Bu bölümde topolojik uzayları ele alacağız. Yolların tanımında kullanacağımız
I
{\displaystyle \ I}
[
0
,
1
]
{\displaystyle \ [0,1]}
p
{\displaystyle \ p}
q
{\displaystyle \ q}
p
{\displaystyle \ p}
q
{\displaystyle \ q}
Bir
X
{\displaystyle \ X}
α
:
[
0
,
1
]
→
X
{\displaystyle \alpha \colon [0,1]\to X}
sürekli fonksiyonuna
X
{\displaystyle \ X}
yol denir. Böyle bir
α
{\displaystyle \alpha }
α
(
0
)
{\displaystyle \alpha (0)}
başlangıç noktası ve
α
(
1
)
{\displaystyle \alpha (1)}
bitiş noktası olarak adlandırılır.
x
,
y
∈
X
{\displaystyle \ x,y\in X}
x
{\displaystyle \ x}
y
{\displaystyle \ y}
I
=
[
0
,
1
]
{\displaystyle \ I=[0,1]}
X
{\displaystyle \ X}
P
(
x
,
y
)
=
{
f
:
[
0
,
1
]
→
X
|
f
(
0
)
=
x
,
f
(
1
)
=
y
}
{\displaystyle \ \mathbf {P} (x,y)=\{f\colon [0,1]\to X|f(0)=x,f(1)=y\}}
Şekil 1:
f
{\displaystyle f}
İlk örnek olarak,
X
=
[
0
,
1
]
{\displaystyle \ X=[0,1]}
f
:
[
0
,
1
]
→
X
{\displaystyle \ f\colon [0,1]\to X}
f
(
x
)
=
x
2
{\displaystyle \ f(x)=x^{2}}
X
=
{\displaystyle \ X=}
R
2
{\displaystyle \mathbb {R} ^{2}}
φ
:
[
0
,
1
]
→
{\displaystyle \varphi \colon [0,1]\to }
R
2
{\displaystyle \mathbb {R} ^{2}}
t
→
(
x
(
t
)
,
y
(
t
)
)
{\displaystyle \ t\to (x(t),y(t))}
x
(
t
)
{\displaystyle \ x(t)}
y
(
t
)
{\displaystyle \ y(t)}
φ
:
[
0
,
1
]
→
{\displaystyle \varphi \colon [0,1]\to }
R
2
{\displaystyle \mathbb {R} ^{2}}
φ
(
t
)
=
(
t
,
t
2
)
{\displaystyle \varphi (t)=(t,t^{2})}
•
φ
(
0
)
=
(
0
,
0
)
{\displaystyle \varphi (0)=(0,0)}
•
φ
(
1
)
=
(
1
,
1
)
{\displaystyle \varphi (1)=(1,1)}
Ayrıca
[
0
,
1
]
{\displaystyle \ [0,1]}
φ
{\displaystyle \varphi }
Diğer bir örnek olarak da bir
g
:
[
−
1
,
1
]
→
[
−
1
,
1
]
{\displaystyle \ g\colon [-1,1]\to [-1,1]}
g
(
x
)
=
x
3
{\displaystyle \ g(x)=x^{3}}
g
{\displaystyle \ g}
X
{\displaystyle \ X}
β
1
:
I
→
X
{\displaystyle \beta _{1}\colon I\to X}
β
1
(
t
)
=
(
t
,
t
3
)
{\displaystyle \beta _{1}(t)=(t,t^{3})}
β
1
(
0
)
=
(
0
,
0
)
,
β
1
(
1
)
=
(
1
,
1
)
{\displaystyle \beta _{1}(0)=(0,0),\beta _{1}(1)=(1,1)}
β
1
{\displaystyle \beta _{1}}
t
{\displaystyle t}
t
3
{\displaystyle t^{3}}
I
{\displaystyle I}
β
1
{\displaystyle \beta _{1}}
y
=
x
3
{\displaystyle y=x^{3}}
Şekil 2: Mavi oklar
φ
1
{\displaystyle \varphi _{1}}
β
1
{\displaystyle \beta _{1}}
Şimdi
φ
1
:
[
−
1
,
1
]
→
{\displaystyle \varphi _{1}\colon [-1,1]\to }
R
2
{\displaystyle \mathbb {R} ^{2}}
φ
1
(
t
)
=
(
t
,
t
3
)
{\displaystyle \varphi _{1}(t)=(t,t^{3})}
φ
1
{\displaystyle \varphi _{1}}
tanım kümesi
I
=
[
0
,
1
]
{\displaystyle I=[0,1]}
φ
1
{\displaystyle \varphi _{1}}
x
3
{\displaystyle x^{3}}
Bunun için, sürekli ve daima artan bir fonksiyon tanımlayalım.
f
:
I
→
[
−
1
,
1
]
{\displaystyle \ f\colon I\to [-1,1]}
f
(
t
)
=
2
t
−
1
{\displaystyle f(t)=2t-1}
Sonra bileşke fonksiyonu yazalım.
φ
1
∘
f
(
t
)
:
I
→
{\displaystyle \varphi _{1}\circ \ f(t)\colon I\to }
R
2
{\displaystyle \mathbb {R} ^{2}}
φ
1
∘
f
(
t
)
=
(
2
t
−
1
,
(
2
t
−
1
)
3
)
{\displaystyle \varphi _{1}\circ \ f(t)=(2t-1,(2t-1)^{3})}
φ
1
∘
f
(
0
)
=
{\displaystyle \varphi _{1}\circ \ f(0)=}
(
−
1
,
−
1
)
{\displaystyle (-1,-1)}
φ
1
∘
f
(
1
)
=
(
1
,
1
)
{\displaystyle \varphi _{1}\circ \ f(1)=(1,1)}
Bu bileşke fonksiyonunun bileşenleri
2
t
−
1
{\displaystyle 2t-1}
(
2
t
−
1
)
3
{\displaystyle (2t-1)^{3}}
I
{\displaystyle I}
Sonuç olarak
φ
1
∘
f
{\displaystyle \varphi _{1}\circ \ f}
X
{\displaystyle X}
Şekil 3:
φ
{\displaystyle \varphi }
φ
¯
{\displaystyle {\bar {\varphi }}}
p
{\displaystyle p}
q
{\displaystyle q}
φ
:
I
→
X
{\displaystyle \varphi \colon I\to X}
φ
¯
{\displaystyle {\bar {\varphi }}}
ters yolu
φ
¯
(
t
)
=
{\displaystyle {\bar {\varphi }}(t)=}
φ
(
1
−
t
)
{\displaystyle \varphi (1-t)}
φ
¯
{\displaystyle {\bar {\varphi }}}
q
{\displaystyle q}
p
{\displaystyle p}
Örnek olarak,
φ
:
I
→
[
−
1
,
1
]
{\displaystyle \varphi \colon I\to [-1,1]}
φ
(
t
)
=
2
t
−
1
{\displaystyle \varphi (t)=2t-1}
φ
(
0
)
=
−
1
{\displaystyle \varphi (0)=-1}
φ
(
1
)
=
0
{\displaystyle \varphi (1)=0}
φ
{\displaystyle \varphi }
φ
¯
:
I
→
[
−
1
,
1
]
{\displaystyle {\bar {\varphi }}\colon I\to [-1,1]}
φ
¯
(
t
)
=
{\displaystyle {\bar {\varphi }}(t)=}
φ
(
1
−
t
)
{\displaystyle \varphi (1-t)}
φ
¯
(
0
)
=
{\displaystyle {\bar {\varphi }}(0)=}
φ
(
1
)
=
1
{\displaystyle \varphi (1)=1}
φ
¯
(
1
)
=
−
1
{\displaystyle {\bar {\varphi }}(1)=-1}
φ
(
0
)
=
−
1
{\displaystyle \varphi (0)=-1}
φ
(
1
)
=
1
{\displaystyle \varphi (1)=1}
Şekil 4: Birim çember ve üzerindeki
φ
{\displaystyle \varphi }
Birim çember üzerinde yol örneğini inceleyelim;
S
1
{\displaystyle S^{1}}
φ
:
I
→
S
1
⊂
C
{\displaystyle \varphi \colon I\to S^{1}\subset \mathbb {C} }
φ
(
t
)
=
{\displaystyle \varphi (t)=}
e
2
i
π
=
cos
2
π
t
+
i
sin
2
π
t
{\displaystyle e^{2i\pi }=\cos 2\pi t+i\sin 2\pi t}
[ 2]
Bu fonksiyon aşağıdaki özellikleri sağlamaktadır:
•
φ
{\displaystyle \varphi }
üstel fonksiyonun sürekli olduğunu biliyoruz.[ 3]
•
φ
(
0
)
=
1
{\displaystyle \varphi (0)=1}
φ
(
1
4
)
=
i
{\displaystyle \varphi {\bigg (}{\frac {1}{4}}{\bigg )}=i}
φ
(
1
2
)
=
−
1
{\displaystyle \varphi {\bigg (}{\frac {1}{2}}{\bigg )}=-1}
φ
(
3
4
)
=
−
i
{\displaystyle \varphi {\bigg (}{\frac {3}{4}}{\bigg )}=-i}
φ
(
1
)
=
1
{\displaystyle \varphi (1)=1}
Bu nedenle,
φ
{\displaystyle \varphi }
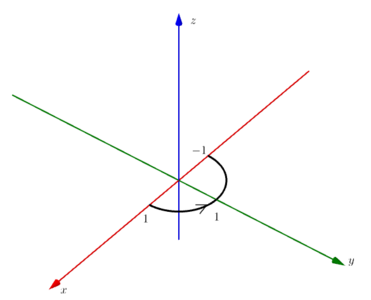
Birim küre üzerinde yol örneğinde ise,
R
3
{\displaystyle R^{3}}
birim küreyi ele alalım:
S
2
=
{
(
x
,
y
,
z
)
∈
R
3
∣
x
2
+
y
2
+
z
2
=
1
}
{\displaystyle S^{2}=\left\{(x,y,z)\in \mathbb {R} ^{3}\mid x^{2}+y^{2}+z^{2}=1\right\}}
φ
:
[
0
,
1
]
→
S
2
⊂
R
3
{\displaystyle \varphi \colon [0,1]\to S^{2}\subset \mathbb {R} ^{3}}
φ
(
t
)
=
{\displaystyle \varphi (t)=}
(
cos
π
t
,
sin
π
t
,
0
)
{\displaystyle (\cos \pi t,\sin \pi t,0)}
φ
{\displaystyle \varphi }
kosinüs ve sinüs fonksiyonları süreklidir.
Sonuç olarak,
φ
(
0
)
=
(
1
,
0
,
0
)
,
φ
(
1
2
)
=
(
0
,
1
,
0
)
{\displaystyle \varphi (0)=(1,0,0),\varphi {\bigg (}{\frac {1}{2}}{\bigg )}=(0,1,0)}
φ
(
1
)
=
(
−
1
,
0
,
0
)
{\displaystyle \varphi (1)=(-1,0,0)}
φ
{\displaystyle \varphi }
S
2
{\displaystyle S^{2}}
Diğer yandan,
β
:
I
→
S
2
⊂
R
3
{\displaystyle \beta \colon I\to S^{2}\subset \mathbb {R} ^{3}}
β
(
t
)
=
{\displaystyle \beta (t)=}
(
0
,
sin
π
2
t
,
cos
π
2
t
)
{\displaystyle (0,\sin \pi 2t,\cos \pi 2t)}
β
(
0
)
=
(
0
,
0
,
1
)
,
β
(
1
)
=
(
0
,
1
,
0
)
{\displaystyle \beta (0)=(0,0,1),\beta (1)=(0,1,0)}
β
{\displaystyle \beta }
S
2
{\displaystyle S^{2}}
Herhangi
X
{\displaystyle X}
Y
{\displaystyle Y}
homeomorfizma ,
f
:
X
→
Y
{\displaystyle \ f\colon X\to Y}
birebir ve örten bir fonksiyon şeklinde tanımlanır;
f
{\displaystyle f}
f
−
1
:
Y
→
X
{\displaystyle \ f^{-1}\colon Y\to X}
I
{\displaystyle I}
I
{\displaystyle I}
kümesi şu şekilde tanımlanır:
Homeo
+
(
I
,
I
)
=
{
f
:
I
→
I
∣
f
daima artan ve homeomorfizma
}
{\displaystyle \operatorname {Homeo} ^{+}(I,I)=\left\{f\colon I\to I\mid f\ {\text{daima artan ve homeomorfizma}}\right\}}
Homeo
+
(
I
,
I
)
{\displaystyle \operatorname {Homeo} ^{+}(I,I)}
∘
{\displaystyle \circ }
gruptur .Kanıtı için, önce
Homeo
+
(
I
,
I
)
{\displaystyle \operatorname {Homeo} ^{+}(I,I)}
∘
{\displaystyle \circ }
f
,
g
∈
Homeo
+
(
I
,
I
)
{\displaystyle f,g\in \operatorname {Homeo} ^{+}(I,I)}
f
∘
g
:
I
→
I
∈
Homeo
+
(
I
,
I
)
{\displaystyle f\circ g\colon I\to I\in \operatorname {Homeo} ^{+}(I,I)}
f
{\displaystyle f}
g
{\displaystyle g}
f
∘
g
{\displaystyle f\circ g}
[ 4]
İki sürekli fonksiyonun bileşkesi de sürekli bir fonksiyon olduğundan
f
∘
g
{\displaystyle f\circ g}
Öte yandan,
f
−
1
{\displaystyle f^{-1}}
g
−
1
{\displaystyle g^{-1}}
(
f
∘
g
)
−
1
=
{\displaystyle (f\circ g)^{-1}=}
g
−
1
∘
f
−
1
{\displaystyle g^{-1}\circ f^{-1}}
f
∘
g
:
I
→
I
∈
Homeo
+
(
I
,
I
)
{\displaystyle f\circ g\colon I\to I\in \operatorname {Homeo} ^{+}(I,I)}
Şimdi (
Homeo
+
(
I
,
I
)
,
∘
{\displaystyle \operatorname {Homeo} ^{+}(I,I),\circ }
grup aksiyomlarını (bileşim, birim eleman, terslenebilme) sağladığını gösterelim.[ 5]
•Bileşim özelliği: Herhangi
f
,
g
,
h
∈
Homeo
+
(
I
,
I
)
{\displaystyle f,g,h\in \operatorname {Homeo} ^{+}(I,I)}
x
∈
I
{\displaystyle x\in I}
•
h
∘
(
g
∘
f
)
(
x
)
=
h
(
g
∘
f
(
x
)
)
=
h
(
g
(
f
(
x
)
)
)
{\displaystyle h\circ (g\circ f)(x)=h(g\circ f(x))=h(g(f(x)))}
(
h
∘
g
)
∘
f
(
x
)
=
(
h
∘
g
)
(
f
(
x
)
)
=
h
(
g
(
f
(
x
)
)
)
{\displaystyle (h\circ g)\circ f(x)=(h\circ g)(f(x))=h(g(f(x)))}
x
∈
I
{\displaystyle x\in I}
h
∘
(
g
∘
f
)
(
x
)
=
(
h
∘
g
)
∘
f
(
x
)
{\displaystyle h\circ (g\circ f)(x)=(h\circ g)\circ f(x)}
•Birim eleman:
Id
:
I
→
I
{\displaystyle \operatorname {Id} \colon I\to I}
Id
(
x
)
=
x
{\displaystyle \operatorname {Id} (x)=x}
Homeo
+
(
I
,
I
)
,
∘
{\displaystyle \operatorname {Homeo} ^{+}(I,I),\circ }
Id
{\displaystyle \operatorname {Id} }
birim fonksiyon ) süreklidir, birebir ve örtendir, daima artandır.
Öte yandan
Id
−
1
:
I
→
I
{\displaystyle \operatorname {Id} ^{-1}\colon I\to I}
x
∈
I
{\displaystyle x\in I}
Id
−
1
(
x
)
=
Id
(
x
)
⇔
Id
−
1
=
Id
{\displaystyle \operatorname {Id} ^{-1}(x)=\operatorname {Id} (x)\Leftrightarrow \operatorname {Id} ^{-1}=\operatorname {Id} }
Sonuç olarak her
x
∈
I
{\displaystyle x\in I}
(
f
∘
Id
)
(
x
)
=
f
(
Id
(
x
)
)
=
f
(
x
)
,
(
Id
∘
f
)
(
x
)
=
Id
(
f
(
x
)
)
=
f
(
x
)
{\displaystyle (f\circ \operatorname {Id} )(x)=f(\operatorname {Id} (x))=f(x),(\operatorname {Id} \circ f)(x)=\operatorname {Id} (f(x))=f(x)}
•Terslenebilme: Herhangi bir
f
∈
Homeo
+
(
I
,
I
)
{\displaystyle f\in \operatorname {Homeo} ^{+}(I,I)}
Homeo
+
(
I
,
I
)
{\displaystyle \operatorname {Homeo} ^{+}(I,I)}
f
{\displaystyle f}
f
−
1
{\displaystyle f^{-1}}
f
−
1
∈
Homeo
+
(
I
,
I
)
{\displaystyle f^{-1}\in \operatorname {Homeo} ^{+}(I,I)}
f
−
1
{\displaystyle f^{-1}}
Herhangi
x
,
y
∈
I
{\displaystyle x,y\in I}
x
<
y
{\displaystyle x<y}
f
−
1
(
x
)
<
f
−
1
(
y
)
{\displaystyle f^{-1}(x)<f^{-1}(y)}
f
{\displaystyle f}
x
<
y
{\displaystyle x<y}
f
(
x
)
<
f
(
y
)
{\displaystyle f(x)<f(y)}
f
{\displaystyle f}
f
(
a
)
=
x
{\displaystyle f(a)=x}
f
(
b
)
=
y
{\displaystyle f(b)=y}
a
,
b
∈
I
{\displaystyle a,b\in I}
f
{\displaystyle f}
x
<
y
{\displaystyle x<y}
f
(
a
)
<
f
(
b
)
{\displaystyle f(a)<f(b)}
a
<
b
{\displaystyle a<b}
f
−
1
(
x
)
<
f
−
1
(
y
)
{\displaystyle f^{-1}(x)<f^{-1}(y)}
∘
{\displaystyle \circ }
Homeo
+
(
I
,
I
)
{\displaystyle \operatorname {Homeo} ^{+}(I,I)}
Eğer
h
∈
Homeo
+
(
I
,
I
)
{\displaystyle h\in \operatorname {Homeo} ^{+}(I,I)}
h
(
0
)
=
0
{\displaystyle h(0)=0}
h
(
1
)
=
1
{\displaystyle h(1)=1}
Kanıtını şöyle açıklayabiliriz; herhangi
h
∈
Homeo
+
(
I
,
I
)
{\displaystyle h\in \operatorname {Homeo} ^{+}(I,I)}
h
:
I
→
I
{\displaystyle h\colon I\to I}
homeomorfizmadır. O halde
f
−
1
{\displaystyle f^{-1}}
h
(
0
)
≠
{
0
,
1
}
{\displaystyle h(0)\neq \{0,1\}}
h
(
0
)
=
x
∈
(
0
,
1
)
{\displaystyle h(0)=x\in (0,1)}
(
0
,
1
]
{\displaystyle (0,1]}
[ 6]
h
{\displaystyle h}
h
(
(
0
,
1
]
)
{\displaystyle h((0,1])}
h
{\displaystyle h}
h
(
(
0
,
1
]
)
=
[
0
,
x
)
∪
[
x
,
1
]
{\displaystyle h((0,1])=[0,x)\cup [x,1]}
[
0
,
x
)
∪
[
x
,
1
]
{\displaystyle [0,x)\cup [x,1]}
h
(
0
)
≠
0
,
1
{\displaystyle h(0)\neq {0,1}}
h
(
0
)
=
{
0
,
1
}
{\displaystyle h(0)=\{0,1\}}
Şimdi
h
(
0
)
=
0
{\displaystyle h(0)=0}
h
(
0
)
=
1
{\displaystyle h(0)=1}
h
{\displaystyle h}
0
<
1
{\displaystyle 0<1}
h
(
0
)
<
h
(
1
)
{\displaystyle h(0)<h(1)}
1
<
h
(
1
)
{\displaystyle 1<h(1)}
h
:
[
0
,
1
]
→
[
0
,
1
]
{\displaystyle h\colon [0,1]\to [0,1]}
h
(
1
)
{\displaystyle h(1)}
1
{\displaystyle 1}
h
(
0
)
=
0
{\displaystyle h(0)=0}
h
(
1
)
=
1
{\displaystyle h(1)=1}
Sonuç olarak, her
h
∈
Homeo
+
(
I
,
I
)
{\displaystyle h\in \operatorname {Homeo} ^{+}(I,I)}
h
(
0
)
=
0
{\displaystyle h(0)=0}
h
(
1
)
=
1
{\displaystyle h(1)=1}
değiştir
X
{\displaystyle X}
f
,
g
:
I
→
X
{\displaystyle f,g\colon I\to X}
f
=
g
∘
h
{\displaystyle f=g\circ h}
h
∈
Homeo
+
(
I
,
I
)
{\displaystyle h\in \operatorname {Homeo} ^{+}(I,I)}
f
≈
g
{\displaystyle f\approx g}
≈
{\displaystyle \approx }
denklik bağıntısıdır , önermesinin ispatını şöyle açıklayabiliriz;
≈
{\displaystyle \approx }
simetri ve geçişme özelliklerini sağladığını göstereceğiz.
•yansıma:
f
:
I
→
X
{\displaystyle f\colon I\to X}
h
{\displaystyle h}
Id
:
I
→
I
{\displaystyle \operatorname {Id} \colon I\to I}
birim fonksiyon alırsak
f
=
f
∘
h
{\displaystyle f=f\circ h}
f
≈
f
{\displaystyle f\approx f}
•simetri:
f
,
g
:
I
→
X
{\displaystyle f,g\colon I\to X}
f
≈
g
{\displaystyle f\approx g}
g
≈
f
{\displaystyle g\approx f}
f
≈
g
{\displaystyle f\approx g}
f
=
g
∘
h
{\displaystyle f=g\circ h}
h
∈
Homeo
+
(
I
,
I
)
{\displaystyle h\in \operatorname {Homeo} ^{+}(I,I)}
h
{\displaystyle h}
f
=
g
∘
h
⇔
f
∘
h
−
1
=
g
{\displaystyle f=g\circ h\Leftrightarrow f\circ h^{-1}=g}
k
=
h
−
1
∈
Homeo
+
(
I
,
I
)
{\displaystyle k=h^{-1}\in \operatorname {Homeo} ^{+}(I,I)}
g
=
f
∘
k
{\displaystyle g=f\circ k}
g
≈
f
{\displaystyle g\approx f}
•geçişme:
f
,
g
,
h
:
I
→
X
{\displaystyle f,g,h\colon I\to X}
f
≈
g
{\displaystyle f\approx g}
g
≈
h
{\displaystyle g\approx h}
f
≈
h
{\displaystyle f\approx h}
Varsayımlara göre,
f
=
g
∘
φ
f
{\displaystyle f=g\circ \varphi _{f}}
g
=
h
∘
φ
g
{\displaystyle g=h\circ \varphi _{g}}
φ
f
,
φ
g
∈
Homeo
+
(
I
,
I
)
{\displaystyle \varphi _{f},\varphi _{g}\in \operatorname {Homeo} ^{+}(I,I)}
f
=
g
∘
φ
f
⇔
f
=
h
∘
φ
g
∘
φ
f
{\displaystyle f=g\circ \varphi _{f}\Leftrightarrow f=h\circ \varphi _{g}\circ \varphi _{f}}
φ
f
,
φ
g
∈
Homeo
+
(
I
,
I
)
{\displaystyle \varphi _{f},\varphi _{g}\in \operatorname {Homeo} ^{+}(I,I)}
φ
f
∘
φ
g
∈
Homeo
+
(
I
,
I
)
{\displaystyle \varphi _{f}\circ \varphi _{g}\in \operatorname {Homeo} ^{+}(I,I)}
k
=
φ
f
∘
φ
g
∈
Homeo
+
(
I
,
I
)
{\displaystyle k=\varphi _{f}\circ \varphi _{g}\in \operatorname {Homeo} ^{+}(I,I)}
f
=
h
∘
k
{\displaystyle f=h\circ k}
f
≈
h
{\displaystyle f\approx h}
Sonuç olarak
≈
{\displaystyle \approx }
φ
1
{\displaystyle \varphi _{1}}
φ
2
{\displaystyle \varphi _{2}}
X
{\displaystyle X}
homotopisi ,
F
:
I
×
I
→
X
{\displaystyle F\colon I\times I\to X}
(
a
,
t
)
↦
F
(
a
,
t
)
{\displaystyle (a,t)\mapsto F(a,t)}
(i) Her
a
{\displaystyle a}
F
(
a
,
t
)
:
I
→
X
{\displaystyle F(a,t)\colon I\to X}
p
{\displaystyle p}
q
{\displaystyle q}
(ii)
p
{\displaystyle p}
q
{\displaystyle q}
φ
1
{\displaystyle \varphi _{1}}
φ
2
{\displaystyle \varphi _{2}}
F
(
0
,
t
)
=
{\displaystyle F(0,t)=}
φ
1
{\displaystyle \varphi _{1}}
F
(
1
,
t
)
=
{\displaystyle F(1,t)=}
φ
2
{\displaystyle \varphi _{2}}
φ
1
{\displaystyle \varphi _{1}}
φ
2
{\displaystyle \varphi _{2}}
F
{\displaystyle F}
φ
1
{\displaystyle \varphi _{1}}
φ
2
{\displaystyle \varphi _{2}}
homotopiktirler denilir ve
φ
1
≃
φ
2
{\displaystyle \varphi _{1}\simeq \varphi _{2}}
Yolların bileşkesi, yolların denklik sınıfları üzerinde iyi tanımlıdır. Önermenin kanıtını şöyle açıklayabiliriz:
φ
0
{\displaystyle \varphi _{0}}
φ
1
{\displaystyle \varphi _{1}}
φ
0
′
{\displaystyle \varphi _{0}^{'}}
φ
1
′
{\displaystyle \varphi _{1}^{'}}
[
0
,
1
]
→
X
{\displaystyle [0,1]\rightarrow X}
φ
0
≃
φ
0
′
{\displaystyle \varphi _{0}\simeq \varphi _{0}^{'}}
φ
1
≃
φ
1
′
{\displaystyle \varphi _{1}\simeq \varphi _{1}^{'}}
φ
0
∘
φ
1
≃
φ
0
′
∘
φ
1
′
{\displaystyle \varphi _{0}\circ \varphi _{1}\simeq \varphi _{0}^{'}\circ \varphi _{1}^{'}}
φ
0
ve
φ
0
′
{\displaystyle \varphi _{0}{\text{ ve }}\varphi _{0}^{'}}
F
{\displaystyle F}
φ
1
ve
φ
1
′
{\displaystyle \varphi _{1}{\text{ ve }}\varphi _{1}^{'}}
G
{\displaystyle G}
F
∘
G
{\displaystyle {\displaystyle F\circ G}}
F
∘
G
(
s
,
t
)
=
{
F
(
2
s
,
t
)
,
0
≤
s
≤
1
2
G
(
2
s
−
1
,
t
)
,
1
2
≤
s
≤
1
{\displaystyle F\circ G(s,t)={\begin{cases}F(2s,t),&0\leq s\leq {\frac {1}{2}}\\G(2s-1,t),&{\frac {1}{2}}\leq s\leq 1\end{cases}}}
(
F
∘
G
)
(
s
,
0
)
=
F
(
2
s
,
0
)
=
φ
0
,
(
F
⋆
G
)
(
s
,
1
)
=
G
(
2
s
−
1
,
1
)
=
φ
1
′
{\displaystyle {\displaystyle (F\circ G)(s,0)=F(2s,0)=\varphi _{0}{\text{, }}(F\star G)(s,1)=G(2s-1,1)=\varphi _{1}^{'}}}
φ
0
∘
φ
1
≃
φ
0
′
∘
φ
1
′
{\displaystyle {\displaystyle \varphi _{0}\circ \varphi _{1}\simeq \varphi _{0}^{'}\circ \varphi _{1}^{'}}}
Bir uzayda sabit başlangıç ve bitiş noktaları olan yollar üzerindeki homotopi ilişkisi bir denklik bağıntısıdır . Uzaydaki bir
φ
{\displaystyle \varphi }
[
φ
]
{\displaystyle [\varphi ]}
İspatını yaparken, Homotopi ilişkisinin yansıma, simetri ve geçişme özelliklerini sağladığı göstermeli.[ 7]
•yansıma:
φ
1
:
I
→
X
{\displaystyle \varphi _{1}\colon I\to X}
p
{\displaystyle p}
q
{\displaystyle q}
F
:
I
×
I
→
X
{\displaystyle F\colon I\times I\to X}
F
(
a
,
t
)
=
f
(
t
)
{\displaystyle F(a,t)=f(t)}
F
{\displaystyle F}
φ
1
{\displaystyle \varphi _{1}}
φ
1
{\displaystyle \varphi _{1}}
a
{\displaystyle a}
F
(
a
,
t
)
:
I
→
X
{\displaystyle F(a,t)\colon I\to X}
p
{\displaystyle p}
q
{\displaystyle q}
F
(
0
,
t
)
=
φ
1
(
t
)
,
F
(
1
,
t
)
=
φ
1
(
t
)
{\displaystyle F(0,t)=\varphi _{1}(t),F(1,t)=\varphi _{1}(t)}
φ
1
≃
φ
1
{\displaystyle \varphi _{1}\simeq \varphi _{1}}
•simetri:
φ
1
,
φ
2
:
I
→
X
{\displaystyle \varphi _{1},\varphi _{2}\colon I\to X}
p
{\displaystyle p}
q
{\displaystyle q}
φ
1
≃
φ
2
{\displaystyle \varphi _{1}\simeq \varphi _{2}}
F
:
I
×
I
→
X
{\displaystyle \ F\colon I\times I\to X}
a
{\displaystyle a}
F
(
a
,
t
)
:
I
→
X
{\displaystyle \ F(a,t)\colon I\to X}
p
{\displaystyle p}
q
{\displaystyle q}
F
(
0
,
t
)
=
{\displaystyle F(0,t)=}
φ
1
(
t
)
{\displaystyle \varphi _{1}(t)}
F
(
1
,
t
)
=
{\displaystyle F(1,t)=}
φ
2
(
t
)
{\displaystyle \varphi _{2}(t)}
Şimdi
F
′
:
I
×
I
→
X
{\displaystyle \ F'\colon I\times I\to X}
F
′
(
a
,
t
)
=
{\displaystyle F'(a,t)=}
F
(
1
−
a
,
t
)
{\displaystyle \ F(1-a,t)}
a
{\displaystyle a}
F
′
(
a
,
t
)
=
{\displaystyle F'(a,t)=}
F
(
1
−
a
,
t
)
{\displaystyle \ F(1-a,t)}
p
{\displaystyle p}
q
{\displaystyle q}
F
′
(
0
,
t
)
=
{\displaystyle F'(0,t)=}
F
(
1
,
t
)
=
{\displaystyle \ F(1,t)=}
φ
2
(
t
)
{\displaystyle \varphi _{2}(t)}
F
′
(
1
,
t
)
=
{\displaystyle F'(1,t)=}
F
(
0
,
t
)
=
{\displaystyle \ F(0,t)=}
φ
1
(
t
)
{\displaystyle \varphi _{1}(t)}
g
≃
f
{\displaystyle \ g\simeq f}
•geçişme:
φ
1
,
φ
2
,
φ
3
:
I
→
X
{\displaystyle \varphi _{1},\varphi _{2},\varphi _{3}\colon I\to X}
φ
1
≃
φ
2
{\displaystyle \varphi _{1}\simeq \varphi _{2}}
φ
2
≃
φ
3
{\displaystyle \varphi _{2}\simeq \varphi _{3}}
φ
1
≃
φ
3
{\displaystyle \varphi _{1}\simeq \varphi _{3}}
φ
1
≃
φ
2
{\displaystyle \varphi _{1}\simeq \varphi _{2}}
φ
2
≃
φ
3
{\displaystyle \varphi _{2}\simeq \varphi _{3}}
F
{\displaystyle F}
G
{\displaystyle G}
F
:
I
×
I
→
X
{\displaystyle \ F\colon I\times I\to X}
F
(
0
,
t
)
=
{\displaystyle \ F(0,t)=}
φ
1
(
t
)
{\displaystyle \varphi _{1}(t)}
F
(
1
,
t
)
=
{\displaystyle \ F(1,t)=}
φ
2
(
t
)
{\displaystyle \varphi _{2}(t)}
G
:
I
×
I
→
X
{\displaystyle \ G\colon I\times I\to X}
G
(
0
,
t
)
=
{\displaystyle \ G(0,t)=}
φ
2
(
t
)
{\displaystyle \varphi _{2}(t)}
G
(
1
,
t
)
=
{\displaystyle \ G(1,t)=}
φ
3
(
t
)
{\displaystyle \varphi _{3}(t)}
H
:
I
×
I
→
X
{\displaystyle \ H\colon I\times I\to X}
H
(
a
,
t
)
=
{
F
(
2
a
,
t
)
0
≤
a
≤
1
2
G
(
2
a
−
1
,
t
)
1
2
≤
a
≤
1
{\displaystyle {\begin{aligned}\ H(a,t)&={\begin{cases}\ F(2a,t)&0\leq a\leq {\tfrac {1}{2}}\\\ G(2a-1,t)&{\tfrac {1}{2}}\leq a\leq 1\end{cases}}\end{aligned}}}
H
(
a
,
t
)
{\displaystyle \ H(a,t)}
a
=
1
/
2
{\displaystyle \ a=1/2}
Öte yandan
a
=
1
/
2
{\displaystyle a=1/2}
lim
a
→
1
/
2
+
H
(
a
,
t
)
=
G
(
0
,
t
)
=
{\displaystyle \lim _{a\to 1/2^{+}}H(a,t)=G(0,t)=}
φ
2
(
t
)
{\displaystyle \varphi _{2}(t)}
lim
a
→
1
/
2
−
H
(
a
,
t
)
=
F
(
1
,
t
)
=
{\displaystyle \lim _{a\to 1/2^{-}}H(a,t)=F(1,t)=}
φ
2
(
t
)
{\displaystyle \varphi _{2}(t)}
Dolayısıyla
H
(
a
,
t
)
{\displaystyle \ H(a,t)}
a
=
1
/
2
{\displaystyle \ a=1/2}
H
(
0
,
t
)
=
F
(
0
,
t
)
=
{\displaystyle H(0,t)=F(0,t)=}
φ
1
(
t
)
{\displaystyle \varphi _{1}(t)}
H
(
1
,
t
)
=
G
(
1
,
t
)
=
{\displaystyle H(1,t)=G(1,t)=}
φ
3
(
t
)
{\displaystyle \varphi _{3}(t)}
Sonuç olarak
φ
1
≃
φ
3
{\displaystyle \varphi _{1}\simeq \varphi _{3}}
φ
1
≃
φ
3
{\displaystyle \varphi _{1}\simeq \varphi _{3}}
π
1
(
X
,
x
0
)
{\displaystyle \pi _{1}(X,x_{0})}
Kanıtını göstermek için, örnek olarak
x
0
∈
X
{\displaystyle x_{0}\in X}
π
1
(
X
,
x
0
)
{\displaystyle \pi _{1}(X,x_{0})}
x
0
{\displaystyle x_{0}}
•Birim elemanı
e
x
0
:
[
0
,
1
]
⟶
X
{\displaystyle e_{x_{0}}:[0,1]\longrightarrow X}
e
x
0
(
t
)
=
x
0
{\displaystyle e_{x_{0}}(t)=x_{0}}
[
e
x
0
]
{\displaystyle [e_{x_{0}}]}
f
{\displaystyle f}
[
e
x
0
]
⋆
[
f
]
=
[
f
]
{\displaystyle [e_{x_{0}}]\star [f]=[f]}
F
(
s
,
t
)
=
{
e
x
0
,
0
≤
t
≤
1
−
s
2
f
(
(
2
t
+
s
−
1
)
(
s
+
1
)
)
,
1
−
s
2
≤
t
≤
1
{\displaystyle F(s,t)={\begin{cases}e_{x_{0}},&0\leq t\leq {\frac {1-s}{2}}\\f({\frac {(2t+s-1)}{(s+1)}}),&{\frac {1-s}{2}}\leq t\leq 1\end{cases}}}
•
f
{\displaystyle f}
π
1
(
X
,
x
0
)
{\displaystyle \pi _{1}(X,x_{0})}
f
{\displaystyle f}
f
(
s
)
¯
=
f
(
1
−
s
)
{\displaystyle {\overline {f(s)}}=f(1-s)}
f
{\displaystyle f}
e
ve
f
⋆
f
¯
{\displaystyle e{\text{ ve }}f\star {\overline {f}}}
F
(
s
,
t
)
=
{
f
(
2
t
s
)
,
0
≤
t
≤
1
2
f
(
2
s
(
1
−
t
)
,
1
2
≤
t
≤
1
{\displaystyle F(s,t)={\begin{cases}f(2ts),&0\leq t\leq {\frac {1}{2}}\\f(2s(1-t),&{\frac {1}{2}}\leq t\leq 1\end{cases}}}
•
f
,
g
,
h
∈
π
1
(
X
,
x
0
)
{\displaystyle f,g,h\in \pi _{1}(X,x_{0})}
[
f
]
⋆
(
[
g
]
⋆
[
h
]
)
=
(
[
f
]
⋆
[
g
]
)
⋆
[
h
]
{\displaystyle [f]\star ([g]\star [h])=([f]\star [g])\star [h]}
F
(
t
,
s
)
=
{
f
(
4
t
1
+
s
)
,
0
≤
t
≤
s
+
1
4
g
(
4
t
−
1
−
s
)
,
s
+
1
4
≤
t
≤
s
+
2
4
h
(
1
−
4
1
−
t
2
−
s
)
,
s
+
2
4
≤
t
≤
1
{\displaystyle F(t,s)={\begin{cases}f({\frac {4t}{1+s}}),&0\leq t\leq {\frac {s+1}{4}}\\g(4t-1-s),&{\frac {s+1}{4}}\leq t\leq {\frac {s+2}{4}}\\h(1-4{\frac {1-t}{2-s}}),&{\frac {s+2}{4}}\leq t\leq 1\end{cases}}}
Birim elemanın varlığı, ters elemanın varlığı ve geçişme özelliğini sağladığından ötürü
π
1
(
X
,
x
0
)
{\displaystyle \pi _{1}(X,x_{0})}
1 noktasına dayalı birim çemberin temel grubu
Z
{\displaystyle \mathbb {Z} }
tam sayılar grubuna izomorftur, şeklinde gösterilir:
π
1
(
S
1
,
1
)
≃
Z
{\displaystyle \pi _{1}(S^{1},1)\simeq \mathbb {Z} }
Sekiz şeklinin temel grubu iki eleman tarafından üretilen serbest gruptur .
Vikikitap

![{\displaystyle \ [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd524a5e344fc986442d3b1012c9c75c6a556e28)



![{\displaystyle \alpha \colon [0,1]\to X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01a419385aad2731115d2c7b9a5d529ba1ea149e)






![{\displaystyle \ I=[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a02028e2566e08e610c2cb1c22e25f87f866ef56)
![{\displaystyle \ \mathbf {P} (x,y)=\{f\colon [0,1]\to X|f(0)=x,f(1)=y\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7f5edaedd8807f9071c9718f9bdf421a12233637)


![{\displaystyle \ X=[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0c7bb6d25f662e6e99751cd4d5576115b339bd39)
![{\displaystyle \ f\colon [0,1]\to X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/edaf63107fa480a71a4dcf6ab249866a101194c6)



![{\displaystyle \varphi \colon [0,1]\to }](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9ece8834cb0fbc6f880b07dd1a9f866bc0909cd)







![{\displaystyle \ g\colon [-1,1]\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/393caf512dd24ea638e4332429974e2f46c0bf24)












![{\displaystyle \varphi _{1}\colon [-1,1]\to }](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c393fa1fd5f38b59c6f64da00b29ac84456169c)

![{\displaystyle I=[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/87ec65159c44769434523e46928bc1b82681f842)

![{\displaystyle \ f\colon I\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/61267038619911fe1d6493c3e79a9e926c05fe0d)

















![{\displaystyle \varphi \colon I\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cc7adb34781f121cf02d671939651ec2441b9d07)



![{\displaystyle {\bar {\varphi }}\colon I\to [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1276e338ca315356e956759dbe566ce6c50c54ec)














![{\displaystyle \varphi \colon [0,1]\to S^{2}\subset \mathbb {R} ^{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a32186b839b20760c3c654fbaa176b00bf5c021f)




 Şekil 5
Şekil 5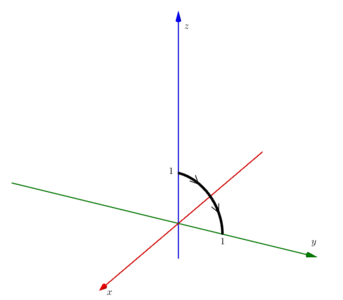 Şekil 6
Şekil 6

















































![{\displaystyle (0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7e70f9c241f9faa8e9fdda2e8b238e288807d7a4)

![{\displaystyle h((0,1])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec64937623d1997e066a2251f3e13ec87610d1db)
![{\displaystyle h((0,1])=[0,x)\cup [x,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cc306796eb2de517551aa543398da18fa61521b8)
![{\displaystyle [0,x)\cup [x,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/358cdfe41e6a6955e23ac30f9b7747c5fe90d1e8)






![{\displaystyle h\colon [0,1]\to [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42e9fb20668fbadd0b40f899072132002cb6324c)



































![{\displaystyle [0,1]\rightarrow X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5ddfe9e7549226d960b776e7cf6f55944c9045e)










![{\displaystyle [\varphi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fbf43266da81d242bddec8bf1fc7af510b13f0a)




































![{\displaystyle e_{x_{0}}:[0,1]\longrightarrow X}](https://wikimedia.org/api/rest_v1/media/math/render/svg/07e7e2856f2fe11c59873c345ddda42b666a1380)

![{\displaystyle [e_{x_{0}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/56efa426e7a621db98d034f7b05377b7aa76ce27)
![{\displaystyle [e_{x_{0}}]\star [f]=[f]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/77f99c4e3c904f06542a6c3db3b381a2e0d4a865)





![{\displaystyle [f]\star ([g]\star [h])=([f]\star [g])\star [h]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d724da4251abe28485de7c0e2ecd2cd10e810131)


